

Description
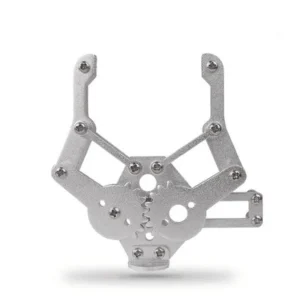
Full Set DIY 2DOF Robot Arm Manipulator Claw+2pcs Servo Brackets(Not Assembly) Kit. Full Set DIY 2DOF Robot Arm Manipulator Claw +2pcs Servo Brackets(Not Assembly) is a robotic arm kit which includes manipulator claw, aluminum bracket and accessories like nuts, bolts etc. This kit very useful to make our own robotic arm which is used in many applications like move a material from one place to another place (Weight not exceed than 500 gm).





Reviews
There are no reviews yet.